LinuxCNC mit Raspberry Pi 4B 8G und Schwanekamp CNC-1000 mit dem Motortreiber SM 1020 Stepper-Motor-Driver
Im Folgenden dient LinuxCNC 2.9.4 als Basis.Dafür ist zunächst die Datei LinuxCNC 2.9.4 Raspberry Pi 4 OS based on Debian Bookworm von LinuxCNC.org zu holen und zu entpacken. Ich ziehe die Lösung, die SD-Karte mit dd zu erstellen, vor.
/dev/sdX ist die SD-Karte, auf die geschrieben werden soll.
Mit dieser SD-Karte wird der RasPi gebootet. Benutzername und Passwort sind cnc.
Alles weitere passiert dann auf dem RaspPi, der dazu Tastatur, Maus und Monitor benötigt.
Als erstes sind ein paar Konfigurationen zu erledigen. Dazu ruft man das entsprechnde Programm auf :
Mit dem Netzwerk gehts los :
Hier werden die Kommentar-# im Abschnitt Ethernet entfernt. Bei Bedarf werden feste Adressen eingetragen, dann muss in der Zeile iface das Wort dhcp durch static ersetzt werden.
Dann ist die Lokalisierung dran :
Bei de_DE.UTF-8 UTF-8 drückt man einmal die Leertaste. Es erscheint ein Stern im
Auswahlkästchen.
Im nächsten Menü wählt man wieder de_DE.UTF-8 aus. Danach passiert
erstmal eine ganze Weile nichts, im Hintergrund wird die Lokalisierung eingestellt.
stellt man auf "Europe" und "Berlin".
Schließlich noch einmal neu booten und die Einstellungen wirken :
Als nächstes ist dann der Latenz-Test dran, die sich ergebenden Maximalwerte braucht man später zum Einrichten von LinuxCNC.

Raspberry Pi GPIOs - PC-Schnittstelle
| GPIO | RaspPi-Pin | Ein-/Ausgang | PC-Pin | Funktion |
|---|---|---|---|---|
| 14 | 8 | Ausgang | 1 | Relais, potentialfrei (weiße 4mm-Buchsen) |
| 15 | 10 | Ausgang | 2 | X - Drehrichtung |
| 18 | 12 | Ausgang | 3 | X - Takt |
| 23 | 16 | Ausgang | 4 | Y - Drehrichtung |
| 23 | 18 | Ausgang | 5 | Y - Takt |
| 25 | 22 | Ausgang | 6 | Z - Drehrichtung |
| 8 | 24 | Ausgang | 7 | Z - Takt |
| GND | 6 | 10 | Masse (GND) | |
| 16 | 36 | Eingang | 11 | Ref.-Schalter Z Pin 1 (mit 10k Pullup gegen 5V) |
| 20 | 38 | Eingang | 12 | Ref.-Schalter Y Pin 5 (mit 10k Pullup gegen 5V) |
| 21 | 40 | Eingang | 13 | Ref.-Schalter X Pin 3 (mit 10k Pullup gegen 5V) |
| GND | 6 | 15 | Masse (GND) | |
| GND | 6 | 18 | Masse (GND) | |
| GND | 6 | 19 | Masse (GND) | |
| GND | 6 | 20 | Masse (GND) | |
| GND | 6 | 21 | Masse (GND) | |
| GND | 6 | 22 | Masse (GND) | |
| GND | 6 | 23 | Masse (GND) | |
| GND | 6 | 24 | Masse (GND) | |
| GND | 6 | 25 | Masse (GND) |
Jetzt muss LinuxCNC auf die Schwanekamp CNC-1000 und den Raspberry Pi 4 konfiguriert werden.
Aus der Tabelle oben ergibt sich der Schaltplan und daraus der Adapter :
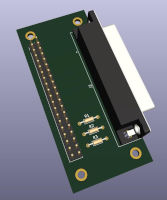
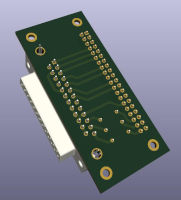
Das ist erstmal der aktuelle Stand am 9.4.2025. Als nächstes kommt das Einrichten der Schnittstelle im LinuxCNC, dann das Testen der Adapterschaltung ohne Fräse und schließlich der erste Fräsversuch.